Màquines complexes
| lloc: | Moodle Institut Montilivi |
| Curs: | Appliquem la tecnologia 3r |
| Llibre: | Màquines complexes |
| Imprès per: | Usuari convidat |
| Data: | dimecres, 22 de juliol 2026, 20:19 |
Descripció
Màquines complexes
1. Transmissió del moviment
Les màquines complexes estan dissenyades entre altres coses per transformar o transmetre un moviment. Els encarregats de realitzar aquesta tasca són els mecanismes. Alguns exemples en són la bicicleta, un rellotge, canvi de marxes d'un cotxe,...


Els mecanismes es classifiquen segons la transmissió o transformació de moviment que realitzen.
1. Mecanismes de transmissió de moviment.
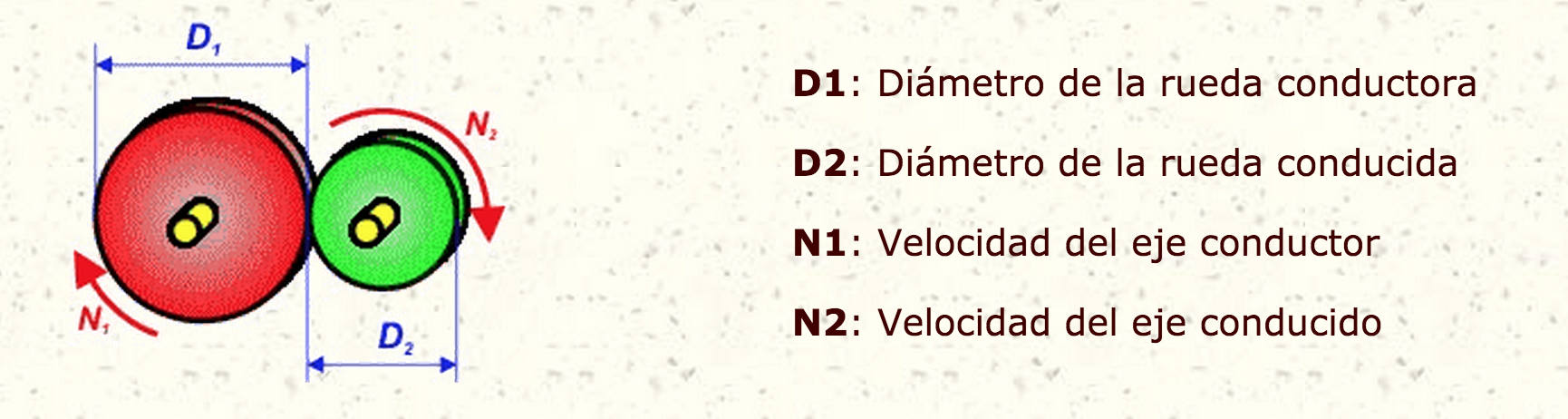
1.1 Rodes de fricció
Aquest mecanisme consta de dues rodes llises en contacte entre elles on una és la roda motriu i l'altra la roda conduïda. L'exterior de les rodes és rugós per a que hi hagi la suficient fricció entre elles per arrossegar-se.
1.2 Rodes dentades
Les rodes dentades o engranatges estan formats per rodes amb dents al seu perímetre. La mida de les dents entre una roda i l'altra ha d'encaixar per tal que es pugui transmetre el moviment.
1.3 Cadenes
Aquests mecanimes es basen en les rodes dentades però hi afegeixen la cadena que encaixa en cadascuna de les dents i permet transmetre un moviment a una certa distància.
Aquest sistema és molt adequat per a transmetre grans esforços però cal tenir en compte el soroll i les distàncies ja que el pes de la cadena influeix en el seu funcionament.
1.4 Corretges
Els mecanismes es troben a una certa distància entre ells i una corretga amb forma plana o dentada habitualment s'encarrega d'arrossegar la roda conduïda.
Aquest sistema és molt adequat per a distàncies relativament àmplies però no permet transmetre grans esforços.
1.5 Relació de transmissió
La relació de transmissió ens indica el número de voltes que donarà la roda conduïda per cada volta de la roda motriu o conductora. És un terme adimensional ja que és una relació. Segons el tipus de mecanisme podem utilitzar unes magnituds o altres.
|
Rodes de fricció |
Rodes dentades |
|
i= |
i = |
Segons el valor del resultat haurem de diferenciar entre :
|
i = 1 |
i < 1 |
i> 1 |
|
la roda motriu i la conduïda giren a la mateixa velocitat per tant són de la mateixa mida. |
la roda conduïda gira més lentament que la roda motriu, per tant és més gran i és un sistema reductor |
la roda conduïda gira més rapidament que la roda motriu, per tant és més petita i és un sistema multiplicador |
2. Transformació de moviment
Ens podem trobar amb tres tipus de moviments que realitzen els mecanismes:
|
Rectilini |
L'objecte o element es desplaça en una trajectòria horitzontal, vertical o inclinada. |
|
Circular |
L'objecte o element es desplaça amb una trajectòria circular. |
|
Alternatiu |
L'objecte combina una trajectòria rectilínia i circular. |
Alguns exemples de mecanismes que transformen el moviment són:
-
- Mecanisme biela-manovella
El mecanisme transforma un moviment rectilini en circular o a l'inrevés.
-
- Lleva
Transforma un moviment circular en rectilini alternatiu.
-
- Sistema pinyó-cremallera
El pinyó es desplaça sobre la cremallera de forma lineal.
